The Robot Operating System (ROS) Introduction
The Robot Operating System or ROS is a framework and an open-source project. It is a project that is currently being developed and used by many industries around the world. Together, with applications that include Self-Driving Vehicles https://www.autoware.auto/ and other industrial robots.

Photo by Dominik Scythe on Unsplash
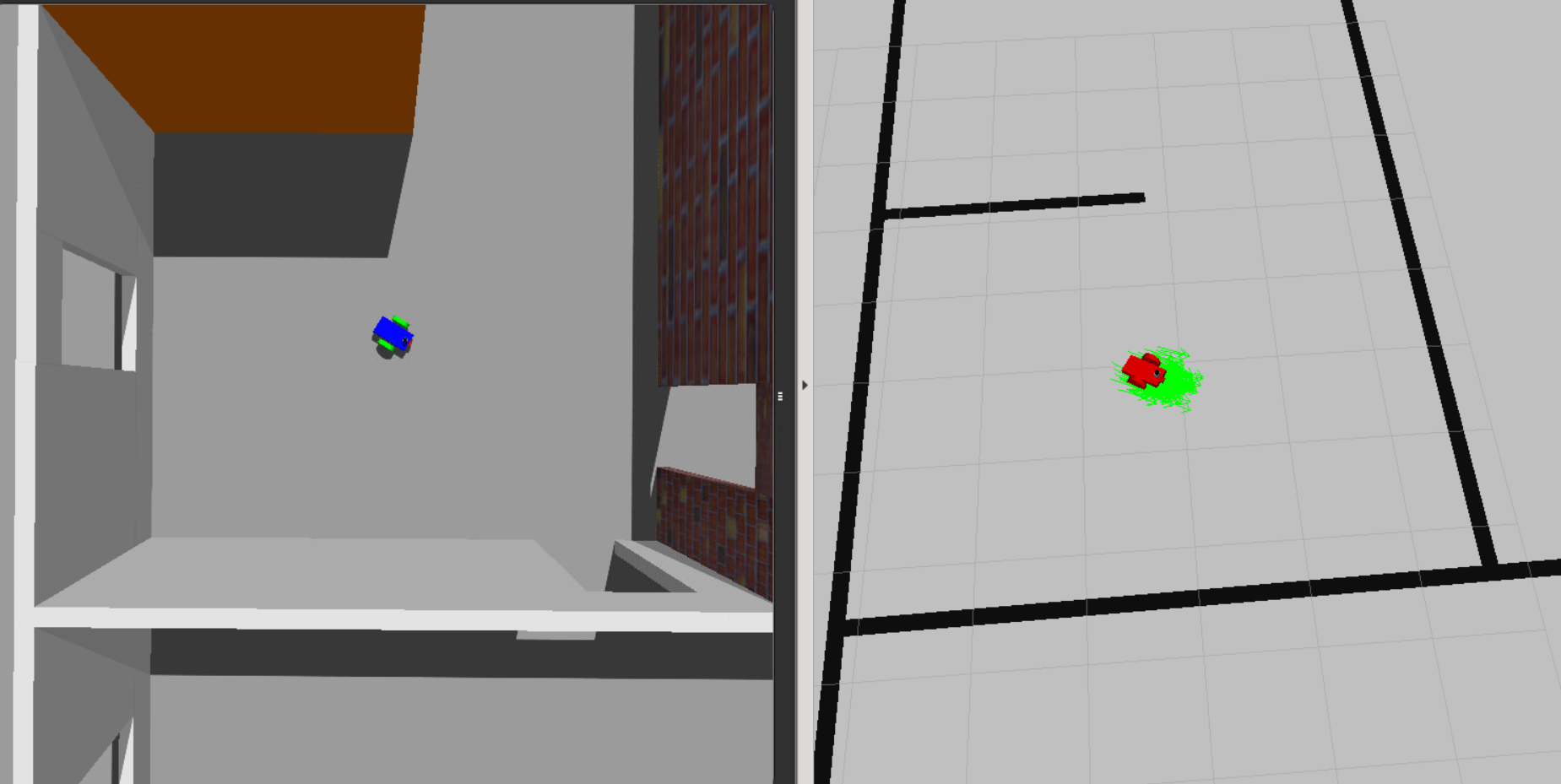
For me as a software engineer has been interesting to have the ability to design a simple robot and have it moving around different environments with ease. After having finished the Self-Driving Nanodegree of Udacity I continue my path with the Robotics Nanodegree. In very little time, I have created a robot and its world environment and have the robot chase a white ball. I have also learned different localization algorithms different than the Extended Kalman Filter I have developed before. Using the adaptive Monte Carlo localization (ACML) ROS package was much simpler on the latest localization project I have finished letting the robot find where it is.
I believe ROS is a project that presents many of the benefits of open source, where many people can contribute packages and benefit from a framework when starting new projects or improving current ones. The field of robotics is a broad one, where thousands of disciplines need to integrate into one or several solutions.